†La matrice jacobiana è la matrice di tutte le derivate parziali prime di una funzione che ha
dominio e codominio in uno spazio euclideo. Una funzione F : ℝn → ℝm è descritta in modo parametrico
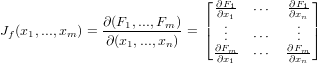
attraverso le sue componenti: (F1 ,...,Fm
,...,Fm )T e la relativa matrice Jacobiana è definita
come:
)T e la relativa matrice Jacobiana è definita
come:
 |